My new Buildbotics controller arrived in the mail last Friday, and I’ve been integrating it into my CNC setup this week. I was interested in this controller mainly because my Linux/EMC2 set up was always so unreliable, and was as old as my mill - getting near 12 years old. I like how the Buildbotics is web based, and I can eliminate using a desktop PC all together.
I think I never had some things set up properly on my old system. It was always giving me errors that only cleared after rebooting the computer and rehoming. Since I’m starting over, I’m trying to get things set up correctly from the beginning. Everything seems to be running great so far! I still need to set up the motors and homing correctly.
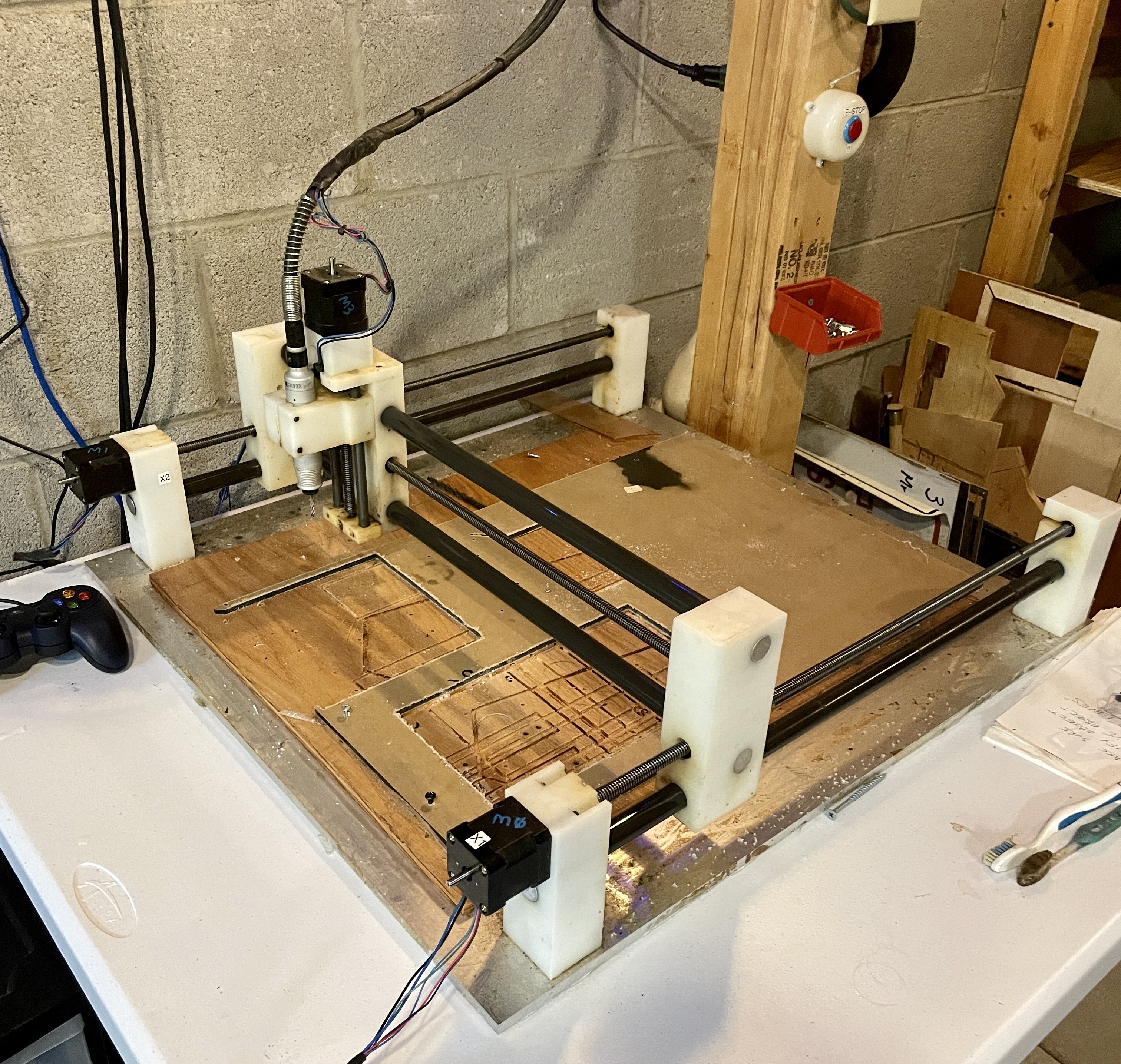
The mill I use is a 3-axis Lumenlab M3 with a 19.5" x 19.25" work space. The X axis uses two motors, with only minimum limit switches. The Y and Z limit switches are at the max ends (Z’s limit switch is all the way up). Interestingly, I had to set the Y and Z to reverse. I’m able to home Y and Z, but whenever X tries to home, it just goes into E-Stop. There are limit switches on both X axis motors.
I’d like to get it to home the way I’m used to doing it with the old set up. The Z axis runs up until it hits the switch, and then runs back down 3.25” and offsets to 0, the Y axis runs to the end and then back down 19.25” and offsets to 0, and then the X axis goes to the minimum, then backs off and zeros.
Thanks for any help. I’ve been using this mill for many years, but I’m still very much a novice!
Mike